
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств связью W0.c), если вход звена W0.c соединен с выходом звена W, а выходная величина yo.c(t) звена WQ.c суммируется со входным воздействием x(t) или вычитается из него (рис. 21-38). Положительная обратная связь 1- на звено W подается сумма x(t) и y0.c(t) так, что входной сигнал для W равен: Частный случай, для которого W0.c - 1 и г = x(t) -\-yQ,c(t). ft./, f
t+wwu Рис. 21-38. Соединение обратной связи (встречио-параллельное соединение). а - общее обозначение. справа обозначение операции вычитания, иногда применяемое в литературе; б - обозначение отрицательной обратной связи и эквивалентное звено; в - следящая система с обратной связью; W -- передаточная функция разомкнутой системы; Ф-замкнутой системы; х, у - вход и выход; z=x-у - рассогласование. Отрицательная обратная связь - на звено W поступает разность x(t) и y0.c(t), так что входной сигнал для W г = x(t) -y0.c(t). Операция вычитания на схемах обозначается специальным знаком (рис. 21-38,а, б). В автоматике используются почти исключительно отрицательные обратные связи. Так как . Yo.o = YW{p), Z(p) =Х(р)-Уо.е(Р) У(р) = Z(p)W(p) = (Х-YC.C)W = = (X- YWo.c) W У(р) 1 + wir0.( Х(р)=ФХ(р), Ф (Р) = W(p) l+W(p)W0.c(p) соответствует охзату звена единичной отрицательной обратной связью, при которой на сравнивающий элемент поступает выходная величина, т. е. у0.с=у..К такой схеме сводится следящая система, поскольку в ней выходная величина является вместе с тем сигналом обратной связи. Звено, охваченное отрицательной обратной связью, эквивалентно одному звену-с передаточной функцией Ф(р). Если W0.c не зависит от р, т. е. W0.c является пропорциональным звеном, то обратная связь называется жесткой. Чаще всего характер обратной связи ие оговаривается. При положительной обратной связи перед вторым членом знаменателя предыдущего выражения будет стоять внак минус. , . I Отметим, что в автоматике характер обратной связи определяется видом операции, осуществляемой над сигналами x(t) и Уо.с (t), т. е. тем производится алгебраическое сложение или вычитание мгновенных значений входного сигнала и сигнала обратной связи, независимо от того, как изменяется амплитуда и фаза сигналов при прохождении через систему. Такое определение отличается от определения, применяемого в теории усилителей, согласно которой характер обратной связи зави-сит от фазовых сдвигов сигнала при прохождении цепей W И Wo.c. Применительно к следящим системам выражение принято называть передаточной функцией разомкнутой систе-м ы, поскольку оно характеризует прохождение сигналов с входа на выход, когда цепь обратной связи в следящей системе разомкнута. Выражение Ф(Р) = Y(p)/X(p) называют передаточной функцией замкнутой системы, поскольку оно характеризует прохождение сигналов со входа на выход, когда цепь обратной связи замкнута. Формулы, связывающие передаточные функции W и Ф, широко применяются в теории автоматического управления. Пример 1. Инерционное звеио с жесткой обратной связью (рис. 21-39). Передаточная функция инерционного звена без обратной связи (разомкнутой системы) ©зых(р) К W(p) = - ых Э(р) 7>+1 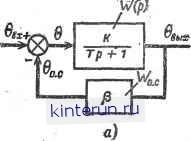 @Sx Г въпе Рис. 21-39. Инерционное звено t жесткой обратной связью, с - структурная схема; б - эквивалентное инерционное звено. 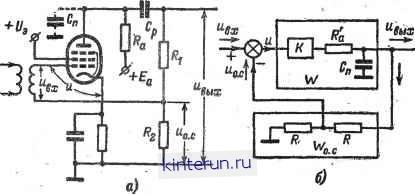 Рис. 21-40. Усилитель с обратной связью. а - принципиальная схема; б - структурная схема - эквивалентное инерционное звеио с обратной связью через делитель R.t R ; R =R \\R R . 1x8 БН j & Э Для жесткой обратной связи передаточная функция является действительным числом Р и ©о.с вых (как правило, 3 <1): Передаточная функция звена с обратной связью (замкнутой системы) ©БЫХ (Р) = ©вх (Р) 1 + ww0.c ~ ТэР + 1 1 -h р/с В результате охвата инерционного звена жесткой обратной связью образуется также инерционное звено с меньшим коэффициентом передачи Кв<К и (что наиболее существенно) с -меньшей постоянной времени: fs<T. В частном случае при 3=1 при К \ 1; 7-э = - Итак, для уменьшения инерционности звено охватывают жесткой обратной связью. Постоянная времени уменьшается тем больше, чем выше К- Соответственно при большом К общий коэффициент передачи будет близким к единице. Примером из области радиотехники может служить усилитель с отрицательной обратной связью в области высоких частот (рис. 21-40). При отсутствии обратной связи (см. стр. 21) И7(р) = tW (р) U (р) Тр + 1 где К и Т то же, что на стр. 21, П70.с = l+Ho-c о-с(Р) вых (Р) ТэР + 1 R1 + R2 При Р=1 Кэ = Тэ = 1 + s/?ap Управляющая обмотка двигателя
l + SRB l+SRa Пример 2. Интегрирующее звено с жесткой обратной связью: W(p) Z(p) Усе (р) У(Р) К Р Ф(р) к Р ГэР+1 гСэ=1/р; 7-э=1/рг 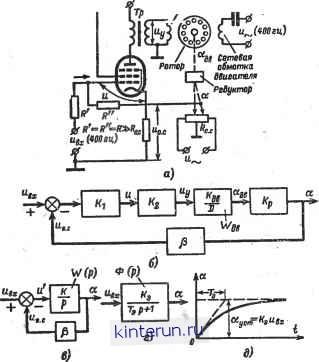 Интегрирующее звено в результате охвата жесткой обратной связью преобразуется в инерционное звено. Соответственно переходная характеристика преобразуется в экспоненту с постоянной -времени Тэ, стремящейся к уровню КэХ. Если р=1, то эквивалентный коэффициент передачи Кэ равен единице (выходная величина в установившемся режиме повторяет входную), а постоянная времени есть величина, обратная коэффициенту усиления; Кэ = 1, Тв-1/К. Примером указанного соединения может служить исполнительный двигатель (при 7 дВ=0) с потенциометром отрицательной обратной связи (рис. 21-41). Управляющая обмотка двухфазного асинхронного двигателя питается от лампового усилителя переменного тока. С ротором двигателя связан потенциометр обратной связи Ro.c, напряжение которого иа.с вычитается из входного переменного напряжения вх. При наличии напряжения и на сетке лампы якорь двигателя начинает вращаться, перемещая связанный .с ним через редуктор движок потенциометра обратной связи Ro.c. Возникающее напряжение и0.с, пропорциональное смещению движка а и углу поворота якоря двигателя адв, вычитается из входного напряжения. Послед- Рис. 21-41. Простейшая следящая система с двигателем. а - упрощенная схема следящей системы для отработки угла пропорционального входному напряжению вх: б - структурная схема системы; Ki - коэффициент передачи входной цепи (от входа до сетки лампы); К? - коэффициент передачи лампового усилителя и трансформатора; Кдв - коэффициент передачи двигателя; Кр-коэффициент передачи редуктора; №=иос/а - коэффициент передачи цепи обратной связи; е - преобразованная структурная схема; г - эквивалентная структурная схема (инерционное звено); д - реакция на ступенчатый сигнал. нее достигается соответствующим выбором направления смещения движка. Напряжение на сетке лампы пропорционально раЗНОСТИ вх И о.с, U = Kl(llsx- -Uo.c). Для R = R = R /С,=0,5 и = =0,5( sx-Ыо.с). Напряжение на управляющей обмотке y=r\2 . где коэффициентом К.2 учитывается усиление лампы и наличие трансформатора Тр. Угловая скорость вращения якоря двигателя пропорциональна напряжению ну, соДв=Лдв у. Соответственно передаточная функция двигателя дв(Р) Uy(p) Угол поворота движка потенциометра а = ЛрОдв, -где Кр - коэффициент передачи редуктора, а напряжение, снимаемое с движка потенциометра, и0.с=Рвдв; (3 - коэффициент передачи цепи обратной связи: р= о.с/одв.
|
|||||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


