
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств имеет размерность частоты и равна приблизительно 3-12 Мгц. В нижней . части .рис. 25-13 приведены графики, позволяющие оценить дальность целей, характеризуемых указанными в верхней части рисунка значениями высоты и угла места.  Рис. 25-13. Ионосферные ошибки измерения дальности. 6 угол места цели; h - высота цели; г - дальность цели. Ошибки измерения дальности вызываются, кроме того, случайными неоднородно-стями, образующимися в атмосфере. Если размер неоднородности длина пути, проходимого волной в неоднородной среде г, и дисперсия коэффициента преломления а2, то среднеквадратичная ошибка измерения дальности (от этой причины) может быть оценена по формуле [Л. 1] (25-22) Как правило, эта составляющая ошибки измерения дальности очень мала. Так, например, при г=600 км, L=200 м и типовом значении дисперсии а2=10-10 ошибка измерения дальности составляет 15 см. Суммарная ошибка измерения вычисляется как корень квадратный из суммы квадратов всех составляющих. Разрешающая способность по дальности определяется формулой (25-10); потенциальная составляющая оценивается по формулам (25-11) и (25-12). Амплитудные методы Амплитудные методы измерения дальности, как правило, основываются на оценке времени распространения амплитудно-модулированных радиоволн до цели и обратно путем регистрации моментов характерных изменений амплитуды излученных колебаний и принимаемых сигналов *. Из различных видов амплитудной модуляции колебаний наиболее употребительной является импульсная. Импульсное дальномерное устройство (рис. 25-14). Передатчик генерирует радиоимпульсы длительностью т с периодом повторения Т. Антенный переключатель (АП) подсоединяет антенну к передатчику на время генерации (т) и к приемнику - на остальное время. Принятые сигналы от приемника поступают к выходному устройству, в котором происходит измерение времени запаздывания гг. В качестве выходного устройства в схеме используется электроннолучевая трубка с амплитудной отметкой и линейной во времени горизонтальной разверткой. Схема развертки запускается импульсами синхронизатора одновременно с передатчиком. Положение принятых импульсных сигналов на экране трубки (рис. 25-15) позволяет определить дальность цели. Расстояние отметки от начала развертки равно (= -trVv&s, где Vpas - скорость развертки, поэтому [см. формулу (25-21)] (25-23) Интервал однозначного измерения дальности определяется периодом следования излучаемых импульсов Д/-о (25-24) Если время запаздывания отраженного сигнала окажется несколько больше периода следования импульсов передатчика, то с помощью индикатора можно оценить лишь разность- Дг=гг-Т. Следовательно, измеренная дальность будет равна Дг=Дгс/2, в то время как действительная дальность цели составляет r=trc/2. К достоинствам импульсных дальномеров можно отнести: возможность использования в станции одной антенны; простоту собственно измерительного устройства (чаще всего электроннолучевая трубка с амплитудной или яркостиой отметкой); * Ниже рассматривается метод измерения, основанный на непосредственной зависимости амплитуды отраженного сигнала от дальности цели. удобство одновременного измерения дальности многих целей; относительную простоту получения высокой разрешающей способности по дальности; отсутствие помех приему со стороны передатчика, так как процессы излучения и приема колебаний разнесены во времени. К основным недостаткам импульсных дальномеров относятся: необходимость использования передатчиков с-больйшми импульсными мощностями; невозможность измерения малых дальностей (минимальная измеряемая дальность определяется длительностью излучаемых импульсов и временем протекания переходных процессов в антенном переключателе; она составляет сотни и -даже тысячи метров). Потенциальная составляющая ошибки измерения при импульсном методе характеризуется десятками или сотнями метров. Так, например при т=1 мксек и отношении сигнал/шум jR=10 о(г)пот= -7Г= =35 м. 2V2R Для уменьшения потенциальной ошибки при использовании относительно длинных -импульсов в радионавигационных дально-мерных системах применяют а п л и т у д -н о-ф аз о в ы й метод измерения дальности. Его суть состоит в том, что вначале грубое измерение времени запаздывания осуществляется ло импульсной огибающей сигналов, а затем производится уточнение дальности фазовым методом (см. § 25-2) по высокочастотному заполнению. В результате точность измерения достигает нескольких метров. Для повышения разрешающей способ- ности и точности по дальности в радиолокационных импульсных дальномерах применяют внутриимпульсную частотную или фазовую модуляцию (см. разд. 3, § 3-4). Оптимальная обработка принятых сигналов, имеющих длительность т, позволяет уменьшить длительность выходных сигналов приемника в Ксш раз *шх= ~ (25-25) и во столько же раз повысить потенциальные разрешающую способность и точность станции. При использовании частотной модуляции КСж=Л/мТ, (25-26) где Afм - девиация частоты за время импульса.  Рис. 25-16. Фазоманипулированный сигнал и Для фазовой манипуляции . Ксж=- , (25-27) где Тф - протяженность элемента сигнала с : постоянной начальной фазой (рис. 25-16), 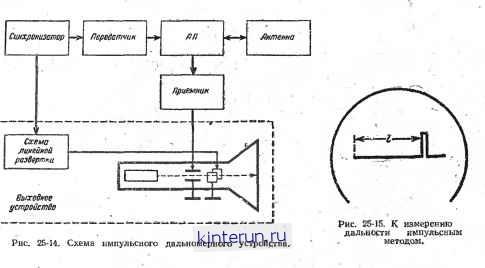 (енератор шума Линия задержки Дальномериое устройство с непрерывным излучением (рис. 25-17). Амплитудный метод измерения дальности мо- жет быть применен и при непрерывном излучении. Представляет, например, интерес радиолокационный дальномер, в котором незатухающие колебания модулированы по амплитуде шумоподобным напряжением (рис. 25-17). Шумоподоб-ное напряжение им от модулятора поступает к генератору высокой частоты (ГВЧ). Модулированные колебания излучаются в пространство. Отраженный сигнал через приемную антенну подводится к приемнику, где выделяется огибающая принятого сигнала. От приёмника напряжение иКр поступает к одному из входов коррелятора (см. т. 1, разд. 3, § 3-3). К другому входу подводится напряжение, пропорциональное модулирующему kuM и смещенное с помощью регулируемой линии задержки на время ta. В корреляторе напряжения перемножаются и результат перемножения суммируется за некоторое время наблюдения Тв: Укор = иПр (0 £ м {t - t3) dt= о = I ki иы (t - tr) fo<M (t -t3) dt, (25-28) так как Инр(<) - kiUa(t - U). Антенна передатчика ЬимК
Рис. 25-17. Схема дальномерного устройства с непрерывным излучением. При решении некоторых частных задач определение дальности цели основывается на использовании зависимости амплитуды отраженного сигнала от расстояния между  Выходное напряжение коррелятора UKOp поступает к измерителю напряжения (например, стрелочный прибор). Если плавно менять задержку г3, то выходное напряже- ние будет претерпевать изменения (рис. 25-18), достигая максимума при г3= =tr (U - запаздывание отраженного сигнала); чем больше время наблюдения Тш, тем острее и выше этот максимум. Для измерения времени запаздывания сигнала нужно плавно (и достаточно медленно) изменять время задержки модулирующего напряжения (г3) и Зафиксировать момент максимума выходного напряжения. При этом r=ct3/2. Потенциальные характеристики точности и разрешения по дальности при использовании сигнала любой формы определяют- ся спектром излучаемых колебаний [см. формулы (25-6), (25-11)]. Рис. 25-18. Выходное напряжение коррелятора. РЛУ и целью. Известно, что мощность отраженного сигнала, поступающего иа вход .приемника РЛС, обратно пропорциональна четвертой степени дальности цели (25-29) где k - коэффициент пропорциональности, зависящий от параметров РЛУ, затухания энергии радиоволн в среде и характеристик самой цели. Значения этого коэффициента могут изменяться в очень широких пределах. Рассматриваемый метод оценки дальности применяется в радиовзрывателях авиационных ракет [Л. 3]. При решении этой конкретной задачи поглощением энергии в среде можно пренебречь вследствие малости расстояний; отражающие свойства целей, .а также углы, под которыми осуществляются атаки целей, можно считать приблизитель-
|
||||||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


