
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств представляет собой кардиоиду (рис. 25-152, а), определяемую выражением Ес = =EA(l+sin(p). При изменении фазы э.д.с. в одной из антенн направление минимума кардиоиды изменяется на 180° (рис. 25-152,6). Пеленгацию в АРК производят равносигнальным методом. Равносигнальное направление образуется путем периодического изменения (с частотой несколько десятков герц) фазы напряжения рамки, в результате чего с такой же частотой изменяется на 180° направление минимума кардиоиды.
 +Ер. макс Рис. 25-152. Суммарная диаграмма направленности антенной системы АРК. Сигнал рамочной антенны усиливается в УВЧ примерно до величины сигнала открытой антенны и с помощью фазирующего контура поворачивается по фазе на 90°. Затем сигнал поступает на балансный модулятор, управляемый генератором низкой частоты (рис. 25-151,в). Действие балансного .модулятора эквивалентно механическому переключению с заданной частотой выводов рамки для изменения фазы ее сигналов на 180° (рис. 25-151, г). Суммирование сигналов рамочной и ненаправленной антенн осуществляется во входном контуре приемника (рис. 25-151,<?). После усиления и детектирования огибающая сигнала поступает в телефонный канал, с помощью которого можно прослушивать пеленгуемую радиостанцию, и в блок управления компасного канала для автоматического управления вращением рамки. Фаза огибающей сигнала на выходе приемника (сигнал ошибки), зависящая от направления на пеленгуемую радиостанцию (рис. 25-151,е), сравнивается в фазовом де- текторе с фазой опорного сигнала от генератора низкой частоты. На выходе фазового детектора вырабатывается сигнал управления в виде постоянного тока, знак которого зависит от направления прихода пеленгуемого сигнала (рис. 25-151,ж). После усиления в усилителе сигналы управления поступают на двигатель, который, поворачивая рамку, совмещает направление нулевого приема с направлением на пеленгуемую радиостанцию. Угол поворота рамки относительно продольной оси самолета с помощью сельсин-ной передачи передается на стрелочный указатель. Рассмотренная система обеспечивает однозначность отсчета пеленга, так как обладает лишь одним устойчивым положением равновесия, соответствующим истинному пеленгу. В результате вторичного излучения прн отражении радиоволн от частей самолета диаграмма направленности приемной антенной системы искажается; это называется радиодевиацией. Величина ошибки пеленга из-за влияния радиодевиации может достигать 15-20°. Компенсатором ра-диодевиацин вносят поправку в показание стрелочного указателя на основании графика радиодевиацйи, снимаемого индивидуально для каждого летательного аппарата. АРК обеспечивает практическую точность определения пеленга порядка 2-3°. Дальность действия АРК при работе с аэродромной радиостанцией равна примерно 250-350 км. Выбор пеленгуемой радиостанции производится путем настройки приемника АРК на ее рабочую частоту. Радиомаячная система состоит из радиомаяка, координаты которого известны, и радиоприемного устройства, устанавливаемого на борту летательного аппарата или корабля (рис. 25-153). Радиомаяк представляет собой передающее устройство, сигналы которого несут информацию о направлении на маяк. Обычно радиомаяки размещают на земле, но они могут быть установлены и на подвижных объектах, например на кораблях или искусственных спутниках Земли. Бортовое приемное устройство служит для выделения из принятых сигналов информации об угловом положении радиомаяка и имеет, как правило, ненаправленную антенну, способную принимать сигналы  Рис. 25-153. Радиомаячная система. радиомаяка с любого направления. В зависимости от параметров сигналов, в которые при излучении закладывается информация об угловом положении, радиомаяки разделяются на амплитудные, фазовые и частотные. По назначению радиомаяки можно разделить на маркерные, зональные (курсовые) и-пеленговые. Маркерные радиомаяки (МРМ) служат для обозначения пункта установки, знание координат которого необходимо при решении навигационных задач (контрольные точки прн заходе самолета на посадку, точки излома морского фарватера и др.). 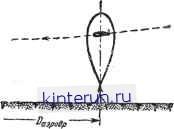 Рис. 25-154. Диаграмма направлен ности маркерного радиомаяка. На рис. 25-154 показана диаграмма направленности в вертикальной плоскости антенны МРМ, используемого в системах посадки самолетов для обозначения момента нахождения самолета на определенном расстоянии от аэродрома при заходе на посадку. Сигналы радиомаяка принимаются бортовым приемным устройством лишь при прохождении самолета над маяком. Чем уже диаграмма направленности радиомаяка, тем точнее определяется момент пролета иад точкой его установки. Таким образом, МРМ являются амплитудными радиомаяками. При наличии нескольких МРМ на трассе полета они различаются видом (кодом) излучаемых сигналов. Функциональная схема типового МРМ приведена на рис. 25-155. Маяк обычно работает в диапазоне УКВ, где сравнительно легко получить узкую диаграмму иаправ-ленмести и обеспечить, таким образом, более высокую точность обозначения задан- ного пункта. Излучаемые сигналы представляют собой короткие или длинные импульсы, соответствующие точкам и тире азбуки Морзе (код маяка) и промодулированные по амплитуде колебаниями звуковой частоты (для прослушивания сигналов в телефонах бортового приемника). Соответствующие комбинации точек и тире выбираются с помощью манипулятора. Бортовое приемное устройство (маркерный радиоприемник - МРП) имеет на
Рис. 25-155. Функциональная схема маркерного радиомаяка. выходе сигнальные индикаторы, позволяющие определить код маяка (сигнальная лампа, звонок, телефоны оператора). Курсовые радиомаяки (КРМ) предназначены для задания одного или нескольких определенных направлений в горизонталь--ной или вертикальной плоскости. С помощью бортового приемного устройства можно определить его положение относительно заданного направления. Фиксированные направления при использовании амплитудных методов могут соответствовать направлениям максимума, минимума и раввоёигналь-ной зоне. Наибольшее распространение получили маяки, образующие равносигнальные фиксированные направления. Например, образование одного равносигнального направления может производиться с помощью двух-лепестковой антенной системы (рис. 25-156). Сигналы передатчика, поочередно излучаемые по каждому лепестку, имеют различные Мьдулятор Гг модулятор коммутатор 11===п *4- rev -I L. Приемиик - - Фильтр Выпрямитель Фильтр Выпрямитель Рнс. 25-156. Функциональные схемы курсового радиомаяка и курсового радиоприемника. Ненаправленная антенна частоты амплитудной модуляции Fj и Рг-На этих частотах производится сравнение интенсивности принимаемых сигналов; на равносигнальном направлении амплитуды сигналов будут равны. Стрелочный индикатор КРП показывает разность выпрямленных напряжений, соответствующую стороне отклонения от равиосигнальиого направления. Точность выдерживания фиксированного направления в диапазоне УКВ может составлять десятые доли градуса. Пеленговые радиомаяки (ПРМ) используют для посылки на борт подвижных объектов сигналов, с помощью которых бортовое приемное устройство определяет пеленг на маяк. Излучение радиомаяка может быть двух видов: 1) излучаются опорные сигналы, характеризующие начало отсчета пеленга (например, направление север - юг), и азимутальные сигналы, характеризующие направление на маяк; 2) излучаются кодированные сигналы, в которых каждому значению кода соответствует определенное направление излучения радиомаяка. Пеленговые радиомаяки могут быть амплитудными, фазовыми или частотными. В амплитудных ПРМ можно использовать пеленгование по максимуму, минимуму и по методу сравнения. Для передачи опорных сигналов (при использовании в ПРМ излучения первого вида) обычно применяется отдельная ненаправленная антенна, а для передачи азимутальных сигналов - вращающаяся направленная антенна. Опорные сигналы излучаются ненаправленной антенной в момент прохождения направленной антенны через начало отсчета пеленга (например, северное направление) и определяют (во времени) опорное направление в бортовом приемном устройстве. Когда направленная антенна повернется . в % направлении подвижного объекта, бортовое устройство начнет принимать азимутальные сигналы. Прн известной скорости вращения направленной антенны время запаздывания азимутальных сигналов относительно опорных в точке приема будет . пропорциональным углу между опорным направлением и направлением на пеленгуемый объект, что позволяет в свою очередь вычислить пеленг маяка. При втором возможном виде излучения ПРМ - посылке кодированных сигналов - .излучение может производиться в дискретных точках азимутальной шкалы. Например, применяется круговая антенная система, состоящая из N антенн направленного действия. Каждая антенна излучает в своем направлении сигналы с определенным кодом. Точность пеленгования определяется в этом случае количеством антенн. 31-1248 Более высокая точность может быть получена при непрерывном изменении кода (например, какого-либо из параметров сигнала) в соответствии с плавным изменением направления излучения. В фазовых ПРМ для определения пеленга используется зависимость между фазой азимутальных сигналов, поступающих в бортовое устройство (под фазой здесь
Передатчик f0 = 5Мгц Двигатела вращения антенны Модулятор Fa =50 гц Рис. 25-157. Функциональная схема пеленгового радиомаяка. понимается время запаздывания азимутальных сигналов относительно начала отсчета), и направлением излучения радиомаяка. Для обозначения начала отсчета фазы сигналов ПРМ излучает дополнительные опорные сигналы. Функциональная схема типового фазового ПРМ, работающего в диапазоне УКВ, приведена на рис. 25-157. В состав маяка входят две антенны: подвижная направленная и неподвижная ненаправленная. Направленная антенна вращается с частотой FA =50 гц и излучает смодулированные колебания на частоте fo= 115 Мгц, которые принимаются бортовым приемным устройством во время облучения объекта. На выходе бортового приемника образуется последовательность импульсов с длительностью каждого и.мпульса, равной времени облучения объекта Т0бл=6А/2яРА (6А-ширина диаграммы направленности вращающейся антенны) и периодом повторения Та =/а- Время запаздывания этих импульсов относительно сигнала начала отсчета пеленга (северного меридиана) при приеме (рис. 25-158) будет зависеть от азимута точки наблюдения (приема). Для создания опорных сигналов используется генератор опорного напряжения (ГОН), связанный с двигателем вращения направленной антенны. Генератор вырабатывает синусоидальные колебания частоты FA =50 гц. Нулевое значение фазы этих колебаний соответствует началу отсчета пеленга. Чтобы бортовое приемное устройство могло разделять азимутальные1 и опорные сигналы, излучаемые на одной несущей частоте fo, применяется частотное разделение каналов опорного и азимутального сигна-
|
||||||||||||||||||||||||||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


