
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств  Тобл А Д Рис. 25-158. Последовательность сигналов ПРМ, принимаемых на объектах / и 2, находящихся на различных азимутах. !- приемник -i i
Ограничители
IФазовращатель Фильтр 50гц Усилитель Фазовый детектор  Рнс. 25-159. Функциональная схема бортового приемного устройства для приема сигналов ПРМ. лов. Опорные сигналы ГОН модулируют по частоте колебания генератора поднесущей частоты (ГПЧ) (/подн 10 кец), которые используют после этого для амплитудной модуляции несущей частоты fo- Таким образом, сигналы ненаправленной антенны имеют двойную модуляцию (частотную и амплитудную) и содержат информацию о начале отсчета пеленга. В бортовом приемном устройстве (рис 25-159) сигналы радиомаяка принимаются ненаправленной антенной и с выхода амплитудного детектора приемника поступают в каналы азимутального и опорного сигналов, на входе которых имеются фильтры, настроенные соответственно на частоты 50 гц и 10 кгц. Фильтр 50 гц выделяет сигналы направленной антенны. На выходе фильтра образуется синусоидальное напряжение с фазой, зависящей от угла ф. Фильтр 10 кгц выделяет сигналы ненаправленной антенны, из которых с помощью частотного детектора выделяются опорные синусоидальные сигналы (также с частотой 50 гц). Опорное напряжение поступает через фазовращатель, имеющий азимутальную шкалу, в фазовый детектор, где сравнивается по фазе с напряжением азимутального канала. С помощью фазовращателя в канале опорного сигнала производится компенсация сдвига фаз опорного и азимутального сигналов, пропорционального азимуту объекта. Момент компенсации определяется с помощью нуль-иидикатора, стрелка которо- го должна устанавливаться в нулевое положение. Отсчет пеленга производится по шкале фазовращателя. В частотных ПРМ используется зависимость между частотой излучаемых колебаний (обычно частотой модулирующих колебаний) и пеленгом объекта. В бортовом устройстве измерение пеленга производится с помощью частотомера, прокалиброванного в соответствующих угловых единицах. Радиоастроиавигациониые устройства служат для решения навигационных задач путем определения угловых координат небесных тел, обладающих достаточно мощным радиоизлучением (Солнце, Луна, планеты, радиозвезды ). Для измерения истинного курса корабля или самолета используют радиоастрокомпасы, определяющие курсовой угол светила, по значению которого находится истинный курс корабля (самолета). Для неавтоматического определения местоположения корабля или самолета применяют р адиосекстанты, определяющие курсовой угол и высоту (угол места) светила. Для автоматического определения местоположения объекта используют радио-астроориентаторы, состоящие из радиосекстанта и счетно-решающего устройства. Радиоастронавигационные устройства позволяют решать навигационные задачи в любых районах земного шара (в том числе в районах высоких широт и магнитных ано- I Г Приемник
Рис. 25-160. Функциональная схема модуляциоино го радиометра (а) и временные диаграммы, поясняющие его работу (б). / - сигналы генератора шума; 2 - сигналы радиоизлучения неба (фона); 3 - суммарный сигнал при отсутствии радиоизлучения светила; 4 - суммарные сигналы при наличии радиоизлучения светила; 5 - сигнал на выходе усилителя при наличии радиоизлучения сверила. малий, где не может быть применен магнитный компас) и практически при любых метеоусловиях. Являясь автономными устройствами, эти приборы обладают большой помехозащищенностью и примерно одинаковой точностью, не зависящей от расстояния до исходного пункта. Сигналы внеземных источников радиоизлучений по своей природе подобны внутренним шумам приемника, имеющим сплошной спектр. По своей интенсивности они 31* меньше уровня собственных шумов прием-, ника, однако чувствительность современных приемников достаточна для их обнаружения при приеме радиоизлучений Солнца й Луны. (Спектральная плотность потока мощности радиоизлучения Солнца на волне 3,2 см составляет /7=4,6-Ю-20 вт/м*-гц и на волне 0,85 см р=1,6-10-19 вт/м2-гц). Полная принимаемая мощность сигнала радиоизлучения P = -ypA/Sa, где р - спектральная плотность потока мощности, Af - полоса пропускания приемника по высокой частоте, SB - эффективная площадь приемной антенны. Множитель /г учитывает хаотическую поляризацию излучения. Приемники сигналов внеземных источников называются радиометрами. Наибольшее распространение получил модуляционный метод приема (модуляционный радиометр), упрощенная схема которого и поясняющие ее работу временные диаграммы приведены на рис. 25-160. К входу приемника поочередно присоединяются антенна и генератор шумов с мощностью, равной примерно общему радиоизлучению неба (фона). Коммутация осуществляется с помощью ГОН с частотой поридка 30 гц. Если антенна направлена на источник радиоизлучения, то напряжение шумов на выходе приемника окажется промодулированным по амплитуде с частотой коммутации антенны. Глубина модуляции, а следовательно и амплитуда огибающей, выделенной с помощью детектора, будут пропорциональны мощности принимаемых сигналов. Фазовый детектор вырабатывает постоянное напряжение, пропорциональное амплитуде огибающей; оно поступает на индикатор, который градуируется в единицах мощности. Функциональная схема радиосекстакта (рис 26 161). Радиосекстант представляег собой систему автосопровождения источника радиоизлучения по угловым координатам с использованием конического обзора . пространства. Когда направление на источник радиоизлучения не совпадает с равносигнальным направлением, образующимся при коническом обзоре пространства, шу- 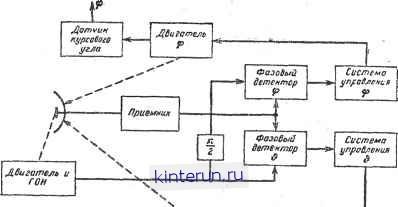
Рис. 25-161. Функциональная схема радиосекстанта. мовое напряжение на выходе антенны оказывается промодулированным по амплитуде с частотой вращения диаграммы направленности. Огибающая этого модулированного напряжения (сигнал ошибки) выделяется на выходе приемника и используется (после разложения на две ортогональные состав- 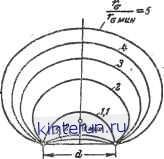 Рис. 25-162. Рабочие зоны угломерной системы. ляющие) для управления антенной по азимуту и углу места. Когда равносигнальное направление совмещается с направлением на цель, сигнал ошибки становится равным нулю. Углы поворота антенны относительно начал.а отсчета (например, продольной оси корабля) определяют угловые координаты источника радиотеплового излучения. Кроме указанных на схеме элементов, в состав радиосекстаита входит гировертикаль, от которой отсчитываются углы места светил. Высокая точность измерения координат достигается лишь при условии достаточно длительного усреднения выходных сигналов. Положение антенны в пространстве должно быть стабилизировано для исключения влияния кренов и рыскания корабля или летательного аппарата, в противном случае возможно не только ухудшение точности измерений, но и срыв автосопровождения На основании измерений углов наблюдения двух известных светил решается обратная задача:-определяются (с помощью астрономических таблиц) координаты точки наблюдения, т. е. местоположение корабля ити самолета. Типовой самолетный радиосекстант [Л. 10], работающий на волне 1,9 см и имеющий антенну диаметром 60 см, обладает среднеквадратичной ошибкой автосопровождения около 3. Точность определения ме- стоположения с помощью угломерной системы, оцениваемая радиусом среднеквадратичного круга рассеяния, равна: Vro8( p1),f + o2( fc)/ где cr((pi) и ст(фг)-среднеквадратичные ошибки измерения пеленгов (в радианах) в двух точках, разнесенных на расстояние d, г± и Гц - расстояния между передатчиком и приемником при измерении пеленгов; а - угол пересечения линий положения, соответствующих отсчитываемым пеленгам. ЕСЛИ ПРИНЯТЬ СТ(ф1) =ст(ф2) =сг(ф) и ввести в формулу (25-161) размер базы d, получим: о(ф)й -i / rf г\ r =- I/ - +- - (25-162) ° sin а * d* d? Рабочие зоны угломерной системы при определении местоположения пока-
|
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


