
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств дена, по формуле где р - радиус кривизны траектории, можно легко определить потребные нормальные ускорения. Если опорные траектории построить при различных гипотезах о движении пункта управления и цели, то можно найти предельные значения jn- Оказывается, что приемлемые величины требуемых поперечных 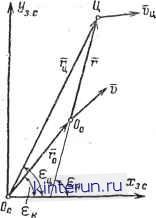 Рис. 27-16. Геометрические соотношения прн трехточечном методе параллельного сближения. ускорений получаются лишь в тех случаях, когда угол <?п близок к нулю. Это обстоятельство существенно ограничивает возможности применения метода совмещения. Трехточечный метод параллельного сближения, как подобный же двухточечный метод, требует, чтобы в течение всего времени наведения УО линия УО - цель оставалась параллельной своему первоначальному положению. На рис 27-16 представлены геометрические соотношения при наведении УО в вертикальной плоскости. Помимо.точки Оо и углов ен и ек, характеризующих положение центра масс УО и наклоны векторов г и г0 относительно оси Ос#з.с. при идеальном наведении, здесь используются те же обозначения, что и на рис. 27-14. Все результаты, которые получаются для вертикальной плоскости, могут быть распространены и на другие плоскости. Для трехточечного метода параллельного сближения можно получить несколько вариантов уравнений рассогласования. Так, в [Л. 2] приводится уравнение Дп = - Е, V где Ап-параметр рассогласования, характеризующий угол отклонения вектора v от направления, при котором УО движется по опорной траектории. В соответствии с этим уравнением аппаратура координатора должна измерять расстояние г, скорость о и угловую, скорость в линии визирования. Наиболее сложно измерить на пункте управления величину и знак е. Возможно также представление уравнения рассогласования в следующей форме [Л. 1]: Дп.у = 8К - Е0 == Ец - Е0 - - arcsin sin (ен - ец) j , (27-39) где Дп.у - угол, характеризующий отклонение центра масс УО относительно линии 000о. Вместо параметра рассогласования Дп.у, выраженного в угловой мере, можно использовать линейное отклонение Дпл центра масс УО от опорной траектории. При малых значениях Дп.у, что обычно имеет место в нормальных условиях при правильно спроектированной системе управления, Дпл Дп.у/-0- (27-40) Техническая реализация координаторов, которые формируют параметры рассогласования, определяемые формулами (27-39) и (27-40), - сравнительно сложная задача. Однако при sin (ен-ец) ен-еп, arcsin - sin (ев - ец) и - (е - ец) L ro J о и г~/ц-г0, что может считаться достаточно точным при гСг0, формула (27-39) приводится к следующему виду: Дп.у ** Ед. - ео- Гц ~~ Г°- (ен - -ец) (27-41) го Из выражения (27-41) следует, что в состав координатора должны входить измерители Ец, ёо, Гц и о, а также относительно простой счетно-решающий прибор. Из выражения (27-41) легко получается уравнение рассогласования, характеризующее Дпл- При этом сигнал, отображающий сомножитель г0, может задаваться программным механизмом. Если величина Гпр, задаваемая программным механизмом, равняется г0, то получается: Дпл - Гпр(бц- Ео) - - (гц - Го) (Ев - Ец). (27-42) На основании уравнений (27-37), (27-38) и (27-41) может быть получена структурная схема, иллюстрирующая образование параметра рассогласования при трехточечном методе параллельного сближения. Эта . схема представлена на рнс. 27-17. В отличие от структурной схемы для метода совмещения здесь имеется еще звено, коэффициент передачи которого Гц- го - уменьшается с ростом г0 и стано- вится равным, нулю при гц=г0. Это говорит о том, что с увеличением г0 трехточечный метод параллельного сближения приближа-ется к методу совмещения. Построение опорных траекторий при рассматриваемом методе параллельного сближения производится по тем же правилам, что и при двухточечном наведении; при этом оказывается, что двухточечный и 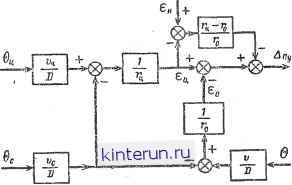 Рис. 27-17. Структурная схема образования параметра рассогласования при наведении по тргхточечному методу параллельного сближения. трехточечный методы параллельного сближения по своим свойствам близки друг другу. Методы совмещения и трехточечный метод параллельного сближения, как и двухточечные флюгерный метод и метод параллельного сближения, являются двумя предельными трехточечными методами наведения: при методе совмещения центр масс УО наводится без упреждения, а при методе параллельного сближения - с идеальным упреждением относительно линии пункт управления - цель. Естественно, что может быть предложен ряд промежуточных трехточечных методов наведения, каждый из которых, однако, должен приближаться к методу совмещения при уменьшении расстояния между УО и целью Во время стыковки космических летательных аппаратов требуется изменять не только их взаимное положение, но и величину относительной скорости сближения УО и цели. При этом к моменту встречи относительная скорость сближения космических кораблей должна становиться равной нулю, а в процессе наведения она должна изменяться так, чтобы расход горючего (рабочего тела), необходимого для работы двигателей, с помощью которых изменяется траектория полета, был наименьшим. 27-3. КООРДИНАТОРЫ РАДИОТЕХНИЧЕСКИХ СИСТЕМ САМОНАВЕДЕНИЯ Функциональные схемы радиотехнических координаторов систем самонаведения При наведении УО на быстроперемеща-ющиеся цели предпочтительнее применять метод пропорционального наведения, а при управлении объектами, предназначенными для встречи с неподвижными и малоподвижными целями, можно использовать прямой метод наведения. Поэтому в последующем рассматриваются лишь координаторы, формирующие параметры рассогласования Дп.н и Дпр. Для измерения ДПр используются, как известно, угломерные устройства. Проекции угловых скоростей вектора v измеряются акселерометрами, оси которых совпадают с боковыми осями УО. Возможность применения акселерометров объясняется тем, что они реагируют на нормальные ускорения, которые пропорциональны угловым скоростям движения УО в соответствующих плоскостях. Определение угловой скорости линии визирования осуществ ляется обычно с помощью радиотехнических устройств, выполняемых на базе угломеров. Таким образом, одной из составных частей координатора системы самонаведения является устройство автоматического определения угловых координат цели или устройство, автоматически измеряющее угловую скорость линии визирования. Поскольку требуется измерить не только величину угла, но и его знак, то угломерные устройства координаторов снабжаются антенными системами, с помощью которых может формироваться равносигналь-ное направление. Это означает, что антенная система должна осуществлять модуляцию принимаемых сигналов (см. разд 21 и 25). С антенны сигналы после преобразования по частоте, усиления и детектирования в радиоприемнике поступают в выходное устройство. Антенна, радиоприемник и выходное устройство образуют пеленгационное устройство ПУ (пеленгатор) координатора. Сигнал рассогласования на выходе пеленгатора представляет собой напряжение, пропорциональное в некоторых пределах угловому отклонению цели от равносигиального > направления. Если цель находится на равносигналь-ном направлении, сигнал рассогласования равен нулю. Для формирования параметра рассогласования Дпр=v-достаточно иметь лишь одно пеленгационное устройство, антенная система которого формирует равносигналь-иую линию, совпадающую по направлению с продольной осью УО. Координаторы с антеннами такого типа называются неподвижными. Угол ДПр -у может быть измерен также устройством автоматического сопровождения, цели по угловым координатам, когда равносигнальное направление (РСН) совпадает с линией визирования и перемещается относительно продольной оси УО. Координаторы со следящим РСН будем называть подвижными. Измерение угловой скорости линии визирования всегда осуществляется подвижным координатором. Для того чтобы РСН
Автоселектор г---1---1 ленных значениях относительной скорости сближения УО и цели. (Описание этих приборов см. в разд. 21, 22.) Функциональные схемы неподвижного и подвижного координаторов, предназначен-Антенна канала синхронизации -< Приемник канала синхронизации Приемник Пеленгационное устройство О Выходное устройство Выход 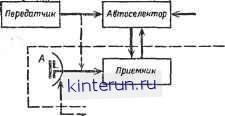 Приемник канала синхронизации Антенна канала синхронизации <
Пеленгационное устройство j I Рис. 27-18. Функциональные схемы координаторов системы самонаведения. а - неподвижный координатор; б - подвижный координатор. Выход. окдило за целью, выходные сигналы пеленгатора подаются на исполнительное устройство (ИУ), которое вырабатывает напряжение, пропорциональное ДПр=,у или е, и по цепи обратной связи воздействует на антенную систему пеленгатора. -Помимо угломерного устройства, в состав координатора входит автоселектор - устройство для автоматического сопровождения- цели по дальности или по скорости. Необходимость автоселектора в координаторе обусловлена двумя причинами. Первая причина вызвана тем, что автоматическое определение угловых координат цели возможно лишь при прохождении через пеленгатор сигналов, поступающих только от одной цели. Однако из-за низкой разрешающей способности по угловым координатам, свойственной системам, которые имеют антенны относительно малых размеров, в угле зрения антенны ПУ может оказаться несколько целей. Дополнительная селекция, получающаяся с помощью автоселектора, позволяет существенно улучшить условия работы угломерного устройства. Вторая причина заключается в том, что в процессе наведения УО в ряде случаев возникает необходимость вырабатывать так называемые дистанционные команды, предназначенные для изменения состояния или траектории УО на заранее, заданных расстояниях до цели или при заранее установ- ных для формирования параметра рассогласования ДПр (рис. 27-18), кроме автоселектора и угломерного устройства, содержат приемник канала синхронизации с антенной и передатчик. Однако необходимо иметь в виду, что передатчик нужен в системах активного самонаведения, а приемник канала синхронизации, используемый для синхронизации автоселектора, применяется лишь в системах полуактивного самонаведения. Если осуществляется пассивное самонаведение, то координатор представляет собой угломерное устройство со сравнительно узкой полосой пропускания приемника. Благодаря этому достигается прием сигналов, выраба-. тываемых лишь одним передатчиком. Поми мо того, в координаторе могут использоваться устройства, служащие для пропускания импульсов с заданными длительностью и частотой следования. Функциональная схема координатора по методу пропорционального наведения отличается от схемы на рис. 27-18,6 лишь тем, что добавляется акселерометр и счетно-решающий прибор. Последний осуществляет умножение напряжения, вырабатываемого радиотехническим угломерным каналом и характеризующего угловую скорость линии визирования на коэффициент а, и вычитание напряжения акселерометра из выходного сигнала умножителя. При установке на УО подвижного координатора систе-
|
||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


