
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств причем для каждого из слагаемых обратное z-преобразование Таким образом, если f(Z): Я(2) N (г) причем R(z) и N(z) -полиномы относительно г, а степень полинома числителя не превышает степени полинома знаменателя и, кроме того, полином N(z)=0 не имеет нулевых и кратных корней, то искомое решение Здесь zv - корни полинома N(z)=0, а dN(z) Часто правая часть уравнений 21-73 и 21-73а представляет собой единичную решетчатую функцию 1[я7 п], для которой z-преобразование Z{\\r£Tn\}=-. z - 1 Тогда F(z) имеет следующий вид: M(z) z F (z) = N(z) z - \ В этом случае решение находится по формуле, вполне аналогичной второй формуле Хевисайда для обычного преобразования Лапласа (см. т. 1, стр. 542). Если для М(г) справедливы сформулированные выше условия, то М (0) /V(0) M(zv) (l-zv)/V(zv) где zv - по-прежнему корни уравнения . N(z)=0. Таким образом, нахождение решения разностных уравнений благодаря z-преоб-разованию сводится к сравнительно простым алгебраическим операциям, наиболее трудная из которых - отыскание корней полинома N(z)=0. 21-9. ПЕРЕДАТОЧНЫЕ ФУНКЦИИ ИМПУЛЬСНЫХ СИСТЕМ Импульсная передаточная функция Рассмотрим цепь, состоящую из 6-клю-ча (Ь-Кл) и фильтра с передаточной функ- цией W(p) (рис. 21-77, а). К такой цепи, как было показано ранее, можно свё*сти системы с практически любым импульсным элементом. После 8-Кл входной сигнал f(t) преобразуется в сигнал f*(t), представляющий собой последовательность модулированных по площади 6-функций (см. стр. 86): f*(t) = f(t)8T(t) = = Е f\kTn\b(t-kTa). Найдем модифицированное z-преобразование выходного сигнала y(t), т. е. 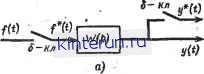 . Рнс. 21-77. Импульсная передаточная функция а - получение функций со звездочкой на входе и выходе: б - представление звена импульсной передаточной функцией W(z) = Y(z)/F(z). Пусть g(t) обозначает импульсную переходную функцию фильтра W(p), т. е. является реакцией этого фильтра на б-функцию. Связь между g(t) и W(p) определяется преобразованием Лапласа (см. стр. 17): W(p)=J g (0 e~pt dt = L{g (/)} о g(t) = L-*{W(p)}. Выходная величина y(t) в любой момент времени t может быть найдена в соответствии с принципом наложения по формуле y(t)= £ g(t-kTn)f[kTn]. (21-74) Значение выходной величины в дискретные равноотстоящие промежутки времени г=и7 п+е7 д, где 0 <е<1: у1пТп + еТп] = у[п, е] = = Е f[nTn]glnTn + eTn.-kTn] = = 2 f[nTn]g[(n-k)Tn+eTn]. Применим к последнему равенству модифицированное 2-преобразование. Тогда, учитывая формулу свертки (21-70), получаем: Y(z, е) = W(z, e)F(z), (21-75) Y(z, e) = Ze [у[пТа + еТп]} - z-преобразование выхода фильтра; F(z) - Z{f[nr ]} - z-преобразование решетчатой функции /[nTVJ, а W(z, e) = Z{gr[(n + e)rn]} = = 2 g[(n + e)Ta]z-n - модифицированное z-преобразование от решетчатой функции, полученной из импульсной переходной характеристики. В частности, при s=0 Y(z) = W(z)F(z) (21-76) W (г)= Z [g [пТп]} = Е д [пТв] z~n. Функция W(z, е) или W(z) называется импульсной передаточной функцией или z-передаточной функцией фильтра W(p). Импульсная передаточная функция представляет собой отношение модифицированного z-преобразования выходной величины У(г, е) к z-преобразованию входной величины F(z). Чтобы вычислить импульсную передаточную функцию фильтра, необходимо: определить импульсную характеристику фильтра g(t) (как обратное преобразование Лапласа от передаточной функции записать решетчатую функцию g[nTu] или е?[(л+в)Гп], т. е. вместо t подставить дискретные величины t=nTrl или t- = (ft-f-e)7 ; найти z-преобразование от g[nTu] или модифицированное z-преобразование от g[(n+e)Tu],T. е. W(z) = Е g[nTn]z-n W(z, е)= Е g[(n + e)Tn\z-n- Из последних соотношений видно, что W(z, е) определяется только свойствами самой цепи (характером функции g(t)) и не зависит от вида входного сигнала. Если известна импульсная передаточная функция W(z, е) и z-преобразование F(z) входного сигнала, то, пользуясь формулой (21-75), легко найти z-преобразование У(г, е) выходной величины, а затем, перейдя к оригиналам, можно вычислить значения выходной величины для дискретных равноотстоящих моментов времени г= =пТи+бТп (е зафиксировано). Для того чтобы определить значения выходной величины в любой фиксированный момент периода, необходимо найти ее значение для всех е. Часто достаточно знать выходную величину для е=0, т. е. решетчатую функцию у[пТп]. За счет потери информации в интервалах между импульсами достигается значительное упрощение вычислений выходной величины, поскольку практически использование аппарата z-преобразований намного проще непосредственных вычислений по формуле (21-74). Заметим, что иногда в литературе встречается запись W(z) = Z{W(p)}, которая отображает тот факт, что W(z) является z-преобразованием от функции g[nTn], полученной в результате обратного преобразования Лапласа от W(p). Эта запись является чисто условной. Она указывает на то, что z-преобразование производится над импульсной (весовой) решетчатой функцией g[nTu] звена, имеющего передаточную функцию W(p) (так как g(t) есть реакция звена с передаточной функцией №(р) на б-функцию). Конечно, W(z) Ф W(p), т. е. W(z) нельзя получить заменой в W(p) параметра р на 2. Это разные функции. Выше было показано, что z-преобразо-вапне для функции г/[пГд] является обычным преобразованием Лапласа функции y*(t) при замене р = -1пг: L{y*(t))=Y(z)\ . г=ср п Это и дает возможность изображать на входе звена W(p) функцию f*(t), образованную преобразованием функции fit) б-ключом. С другой стороны, из рис. 21-77, а следует, что У(Р) = W(p)F*(p), где. F*(p) = L{f*(t)}. Формально обе части этого равенства можно подвергнуть z-преобразованию, т. е. записать: Z{Y(p)} = Z{W(p)F*(p)}. (21-77) Левая часть равенства здесь обозначает 2-преобразование от сигнала у[пТв\, образованного из функции 1/(0 > изображение Лапласа которой равно Y(p)=L{y(t)}, т. е. Y(z). Сопоставляя (21-77) и (21-76), получаем: Z{W(p)F*(p)} = W(z)F(z). Или, учитывая что F* (р)\ у = F (г), р= =- 1пг (21 -77а, Последняя формула показывает, что z-npe-образоваяие произведения двух преобразований Лапласа, из которых одно - переда- S-Кл 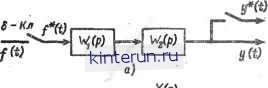 F(z) г--1 rw w > W(z) г- *- Рис. 21-78. Импульсная передаточная функция соединения двух звеньев. о-- исходная схема; б - представление звена импульсной передаточной функцией. W,(z) = Z{W1(p)}; W2(z) = Z{W2(p)}. Таким образом, импульсная передаточная функция произведения звеньев не равна произведению импульсных передаточных функций отдельных звеньев. Иногда приходится рассматривать систему, в которой имеется запаздывающее звено с передаточной функцией №з(р)=е~рха где т3-время запаздывания (рис. 21-79, а). В этом случае импульсная передаточная функция легко находится из передаточной функции W(z, е), т. е. по модифицированному z-преобразо-ванию: Ze {Г(Р)}=Г(2,8). Если запаздывание т3<7п, то передаточная функция системы с запаздыванием -(z, l+s-y), Wx (г, е) = точная функция W(p), а другое - преобразование Лапласа функции со звездочкой , находится как произведение последней (при замене р на In z) на импульсную пере- даточиую функцию. Рассмотрим далее схему на рис. 21-78, состоящую из двух звеньев: W\(jt) и W2(р) и Ь-Кл. Найдем z-преобразование выходной величины, т. е. Y(z) =Z{y[nTn\} = L{y*(t)}. Из рис. 21-78, а следует, что У(р) = B7i(p)W2(p)F*(p). Подвергая это уравнение Z-преобразо-ванию в соответствии со сформулированным правилом, запишем: Y(z) = Z{W1(p)W2(p)} f*(p)\ i = Р- у, II1Z если 0 8 < у; W(z,e-y); если у 8 < 1, где у=Хз/Т11 - относительное время запаздывания. 8-Кл 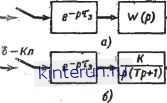 Здесь Z{W1(p)W2(p)}f(z). ZlWiWzip)} = W{z). - импульсная передаточная функция звена W(p) = Wi(p)W2(p), которая может быть найдена в соответствии с правилом, сформулированным на стр. 99. Соответственно модифицированное z-преобразова-нйе: у (г, в) = 2Е {W1 (р) W& (р)} f (z), где 2g - обозначение модифицированного 8-преобразования от передаточной функции W(p) = Wi(p)W2(p). Необходимо отметить, что Z{H7,(p)W2(p)} = W(z) Ф Ф Wi(z)U72(2), Рис. 21-79. Структурная схема системы с запаздыванием. - общая схема; б - схема для расчетного примера. Если требуется найти импульсную передаточную функцию с запаздыванием при 8=0, то последнее выражение упрощается и Wx(z) = z-lW&,\-y). Таким образом, импульсная передаточная функция системы с запаздыванием находится путем подстановки в модифицированную импульсную передаточную функцию вместо 8 значения 1-у и умножения результата на zrl. Пример 1. Записать импульсную передаточную функцию инерционного звена (рис. 21-20) W(p)- Тр + 1 р + а ] Т
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


