
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода 
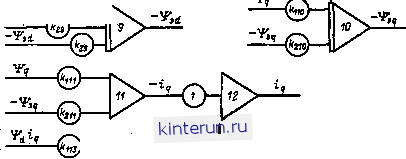 Рнс. 3.41. Структурная схема модели СД в осях d, q, 0. переменных СД в пределах т = 100 -т-50 В/ед; = 25 100 В/ед; m = = 5-7-25 В/ед; m, = 50 -т- 100 В/ед; /Па = = 10 ООО25 000 В/ед; = 5 25 В/ед; те =25-7-50 В/ед. При исследовании СД с учетом автоматического регулирования возбуждения (АРВ) следует модель рнс. 3.41 дополнить схемой формирования напряжения возбуждения Uf по выбранному закону регулирования. В асинхронном режиме пуска СД Uf - 0. Прн исследовании синхронного режима СД на усилители/, 5, 5, 9, 10, 14 следует задать начальные условия, которые следует определить решением уравнений СД в осях d, q, О (см. табл. 3.4) в установившемся режиме, т. е. при ~If ~~dt dt dt U) = Wi,= I. Коэффициенты модели СД рассчитываются по формулам: *81 = *8а= *1Б = 45 = - . 27- - ; 87 = 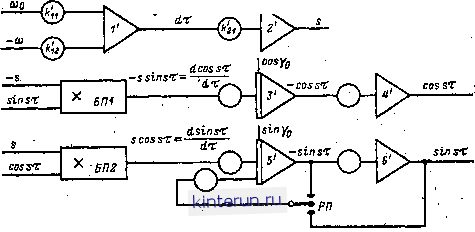 sin St sin2ST
CQsht
Рис. 3.42; Структурная схема модели источинкч питания СД. Здесь 3;1.8. Шкговне тктроявигателнд) Шаговые дтзи np iJ!&nmoT собой разиовиднссть. дяяхройях двигателей и применяются госгных следящих в позиционных снстй8ах..с цшроким диапазоном регулирования скорости (включая и нулевую, когда ШД, развивая удерживающий мшент, выполняет функцию памяти). Область применения: приводы подач Металлорежущих станков с программным управлением, координатографы й ; графопостроители, устройства ввода н вывода данных в ЭВМ и т. д. ШД, как правило,. многополюсные машины с числом полюсов рА. Рази< идвост8 ШД: с активным ротором, с пассивным ротором (индукторные и реакгавные), однофВзныв и специальные. Двигатели с активным ротором ковст-рукгивно не отличаются от синхронных но выполняются без демпрупо)№& коротко замкнутой обмотки. Активный ротор вшюл няется либо с электромагКитяым возбужде-!гаем (может быть использована сянхронная машина ббычного нсполиения или асвнхроя пая машина с фазным ротором, од1га кв обмоток которой питается постоянным током либо с возбуяздением от постоянных магак-тов (магнитоэлектрические ШЩ. Последаяс выполняются без пусковой клетки иа роторе с числом фаз 2 к 3, шагом более 15° к получили имущественное примеятие. Yfim-структввно изготавливаются и одно- и двук-статорном вариантах (две аксиально ра<шо- §3.1] Электрические двигатели ложевные иашины). Поперечный разрез ШД с постоянвымя магннтами в одаюстаторкои исполиевин приведен на рис. 3.43. Отличительные конструктивные признаки ШД с пассивным ротором: зубчатый безоб-моточный ротор из магнитомягкого материала и гребенчатые зоны на явно сраженных полюсах статора, снабженных обкотками возбуждения (рис. 3.44). Выполняются с числами  Рас. 3.43. ПоперечиыЯг разрез ШД с постояввы-ыш магввтамн. 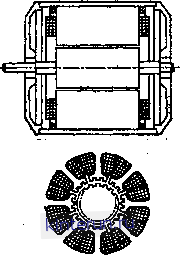 Рис. 3.44. ШД с пассквным ротором. фаз 2, 3, 4, 5, 6 и реже 8, шагом менее 15° и в одно- или многостаторном исполнении (в последнем случае - однофазные машины, число которых равно числу фаз, располагаются аксиально яа одном валу со сдвигом - относительно друг друга иа шаг). Отличительной особенностью иядукпф-нцх ШД является наличие яяяого, образованное обирткой возбуждения или постояиишш магнитами контура возбуждения или под-иагиичшаяия от постоянной составляющей тока в фазах (индукторные ЩД с самопод-магаичиваяием). К индукторно-реактивным относятся миогостаторные ШД, а тахже одио-статорные при (псутствии элехтршагнитных связей между Дюзами в согласном вхлючевяв катушек в фазе. Оамметрия взаимных эдек-тричжхх связей является обязательным при- знаком реактивного ШД, прн этом род ком-мутаоии является несущественным. Получили применение трех- и шесгафазяые ТД (по-следаие в двухстаторном исполнении из двух аксиально расположенных трехфазных Однофазные ШД - модификации многофазных, в которых конструктивными мерами - яесимметряей зубцов, выбором неодинакового их числа и эубцовых делений на полюсах статора или пакетах ротора и т. д. - обеспечивается несимметрия угловой хара-ктертлики синхронизирующего монета. Двухтактное упраоеняе одной обмоткой (на-литае или отсутстаие тока в обмотке) обеспечивает сдвиг кривой сяихронизирующего момента яа шаг. Однофазные шД применяются в приборных системах времени и индикаторных усйствах. К специальным ШД относят модификации синхронных машш; с ка[тящимся н гибким волновым ротором, в которых регулирование скорости достигается введением редуктора, яе-восредствевно управляемого электромагнитным полш статора. Двигатели этого типа возволяют получить шаг менее 1°. Наряду с ШД вращательного движения в последнее вршя получили применение линейные (поступательного движения) и двух-воордннатные ШД, обеспечивающие одновре- менное или раздельное вращательво-поступа-тельвое движение или движение по двум ююрдегаатам в плоскости (ряс, 3.45). Такие 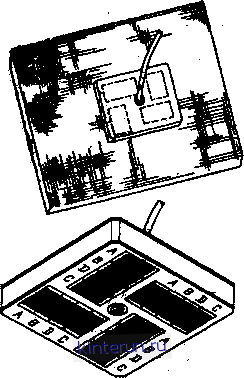 Рве. 3.4S. Даухкворавв твый ШД,
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


