
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода используются для управлеиия преобразователем частоты. Функциональная схема системы показана иа рис. 8.14. Здесь UA и t/T - соответственно датчики тока и потокосцеплений ротора. В качестве W используются датчики Холла, помешенные в воздушный зазор машины. Координатные преобразователи U1 и U2 Веккф потокосцеплений ротора во вра-щакицейся системе координат, ориентированной по полю ротора, однозначно определяется модулем (сигаал Un). Для приведения составляющих тока статора (сигналы Ura>th) квращающейси системе координат isxf i$y (сигаалы хх, Ити) служит ytTpoftcTBo векторного поворота а2. Это устройство 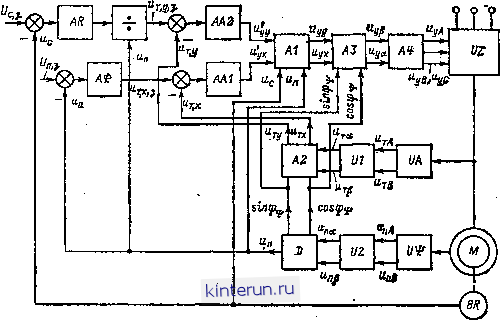 Рис. 8.14. Фуикциоиальиая схема САУ с ориентацией по вектору потокоецеплення ротора. Предназначены для преобразования сигналов тД тВ пД пВ пропорциональных измеренным фазным значениям Ч? д, Т, 1 1 к ортогональной неподвижной системе координат а, Р, О (сигаалы по. пр. та. *rp)-Оба преобразователя выполнены на суммирук>-щих усилителях по идентичным схемам. Их работа основана на следующих соотношениях: ч.ам; 1,р=(м+2Чгв)/]/з; Для последующего преобразовании полученных величии к системе координат, ориентированной по полю, необходимо определить угол фф. между направлением иекто-ра и неподвижными осями статора. Для этой цели служит координатный индикатор D.BD вычисляются модуль потокосцепленнй ротора и нормированные сигналы, пропорциональные sin фф. и cos При этом используются- следующие соотношения: работает и соответстввв со следующими соотношениями: - совфуН-гаШфу; sy=*эу ~ х 4V. Схема А2 представлена иа рис. 8.16. Она включает четыре блока умножении и два сумматора AW1 и AW2. Схема D представлена на рис. 8.15. Рис. 8.16. Схема координатного нидвкатора. На выходе регуляторов составляющих тока статора lx iyAAl, АА2 фес. 8.14) формируются сигналы и, и в, чшределя-юпще напряжение на выходе инвертора. Предварительно эти сигналы щюходят чюз блок развязки А1, устранякиЩвй взаимное влияние контуров регулироваввя г и t- . Схема устройства првведава на рнс. 8.17. Олй работает в соответстввв с уравнениями (8.1) и (8.2) и формирует управляющие сигналы Uyx и Uyy, пропорциональные соответственно напряжениям Usx и Usy Сигналы Uyx я Uyy с выхода А1 подаются иа устройство векторного поворота A3. Это устройство по схеме идентично А2 и выполняет обратное преобразование переменных 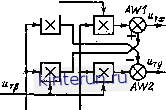 Рис. 8.16. Схема устройства рота. векторного пово- к неподвижной системе координат в соответствии со следующими уравнениями: V у* сое ф - sin фг; уР = V sin Фу+% сое ф . Устройство преобразования координат А4 преобразует полученные сигналы к трехфазной системе координат, в результате чего формируются сигналы и д. у в у С. которые непосредственно используются для ух ух Рис. 8.17. Схема блока развязки. управления преобразователем частоты. Устройство А4 выполнено на суммирующих усилителях и реализует следующие соотношения: уВ---2 V+ Рассмотренные координатные преобразования позволяют выделить в САУ два независимых канала регулирования, один из которых используется для регулирования скорости, а другой - потока машины. При этом переменные , и., и., иу, иу, приведенные к вращающейся системе координат так же, как и задающие сигналы и ,з, Us представляют собой в установившихся режимах постоиниые напряжения. Управление электроприводом осуществляется по принципу подчиненного регулирования, причем каждый из каналов содержит внутренний контур регулирования соответствующей проекции тока {1х> hy)> который подчинен внешнему контуру регулирования потока и скорости. Регуляторы АА1, АА2, АФ и AR (рис. 8.14) синтезируются в соответствии с методикой, разработанной для электроприводов постоянного тока, что обеспечивает оптимальный характер протекания переходных процессов. Рассмотренная система обеспечивает характеристики, качественно не отличающиеся от характеристик электропривода постоянного тока. Благодаря тому, что АД нмеСТ высокую перегрузочную способность и существенно меньший момент инерции ротора, чем ДПТ, электропривод переменного тока позноляет получить более высокие динамические показатели. Реализация этой системы связана с рядом трудностей технического характера. Она содержит большое количество нелинейных блоков, сложна в настройке и весьма чувствительна к изменению параметров системы. Кроме того, применение таких систем связано с использованием сложного преобразователя частоты, который должен обеспечить достаточно точное соответствие выходных наприженнй управляющим сигналам д, и, Иу-. Такой преобразователь, как правило, содержит автономный инвертор с широтно-импульсной модуляцией, в котором тиристоры работают при повышенной частоте коммутации (см. 3.2.1). Разработаны также более простые модификации САУ электроприводом переменного тока, основанным на использовании автономного инвертора тока. В этих системах осуществляется принудительное ориентирование результирующего вектора тока статора относительно потокосцепления ротора. Упрощение САУ достигается тем, что в качестве управляющего воздействия принимается не напряжение питания АД, а его ток, модуль которого контролируетси с помощью внутреннего контура регулирования тока. Контроль положении результирующего вектора тока статора в пространстве в данном случае также не представляет трудностей, так как фаза выходного тока автономного инвертора тока однозначно определяется состоянием его тиристоров (см. 3.2.1). . Принципы построения САУ асинхронным электроприводом с автономным инвертором тока видим на примере функциональной схемы, представленной на рис. 8.18. Силовая схема преобразователя содержит управляемый выпрямитель V и автономный инвертор тока UZ. Внутренний контур регулирования тока включает управляемый выпрямитель V с нмпульсно-фазовой системой управлении AU1 и регулятор тока А А. Датчик тока статора VA в данном случае может быть установлен как в линейных проводах АД, так н в звене постоянного тока нлн на входе V, так как эти трн тока пропорциональны друг другу. Особенности синтеза А А в электроприводе переменного тока рассматриваются ниже. Здесь лишь отметим, что при правильной настройке АА результирующая передаточная функция контура тока соответствует апериодическому звену с постоянной которые снимаются с выхода датчика потоко сцепленнй UO. В качестве t/Ф возможно применение вычислительного устройства, которое вычисляет этн сигналы по намеренным действительным значениям ЭДС двигателя, снимаемым со специальной измерительной обмотки. Благодаря тому, что сигналы потокосцеплений синусоидальны в широком диапазоне изменения частоты тока статора, угол Сеть 9 О Р ту,> 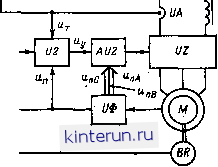 Рис. 8.18. Функциональная схема САУ с автономным инвертором тока. времени 27. При использовании современных СИФУ некомпенсируемая постоянная времени Гр, может быть весьма малой (3-5 мс). Таким образом, при анализе сравнительно медленных процессов регулирования скорости и потока контур тока можно принять идеальным, т. е. считать, что ток в фазах 7 I Хи7 Рис. 8.19. Диаграмма напряжении СИФУИ. двигателя устанавливается мгновенно в соответствии с сигналом задания. Это допущение позволяет исключить из рассмотрения уравнения (8.1) и (8.2). Контроль взаимной ориентацни результирующих векторов тока статора н потокосцеплений ротора Ч, обеспечивается СИФУ инвертором AU2, которая так же, как СИФУ выпрямителем Л W, выполнена по вертикальному принципу с синусоидальными опорными напряжениями. В ЛС/2 в качестве опорных используются сигналы фазных потокосцеплений ротора Y,. Ч,, (а , и д, и\ Ф между результирующими векторами тока и потокоецеплення определяется следующим соотношением (рис. 8.19); Иу = АдгЧЯПф, (8.6) где у - управляющее напряжение AU2\ Ч, - модуль вектора f; fe - коэффициент передачи датчика потока t/Ф. Сигнал у должен формироваться функциональным преобразователем U2 так, чтобы обеспечить независимое регулирование момента и потока двигателя. Для этого, как следует из (8.3) и (8.5), необходимо, чтобы переменные cos ф (8.7) sin ф (8.8) регулировались независимо одна от другой управляющими сигналами (/хжз я t/xiis соответственно, т. е. необходимо выполнение условий: тС08ф = ах; ; (8.9) Ит8тф=Их4,з. (8.10) где Вт ж 3 - сигнал задания проекции вектора тока статора на направление вектора потокоецеплення ротора; туз -сигнал задании ортогональной составляющей тока. Условия (8.9) и (8.10) выполниются, если (8.11) Uy = UaUrys/Ur.m
|
|||||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


