
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Автоматика радиоустройств электродвигатели постоянного тока с независимым возбуждением, асинхронные двухфазные электродвигатели переменного тока. В последнее время стали использоваться асинхронные электродвигатели переменного тока с расщепленными полюсами. При регулировании скорости вращения двигателей исполнительных устройств используются два режима работы электродвигателей: режим плавного изменения скорости вращения пропорционально управляющей величине £7У и режим скачкообразного изменения направления установившейся скорости йу вращения при изменении полярности воздействующей величины t7y. Для обеспечения указанных режимов регулирования в первом случае используются схемы плавного управления, а во втором - схемы, коммутируемые контактами электромеханических реле. Реверсирование двигателей сравнительно большой мощности (от десятков до сотен ватт) обычно осуществляется с помощью релейных переключателей, так как такие регуляторы получаются более простыми и экономичными. Для двигателей малой мошности наиболее целесообразно плавное регулирование скорости их вращения. Серводвигатели постоянного тока с независимым возбуждением В качестве сервомоторов широко применяются электродвигатели с независимым возбуждением, управляемые со стороны якорной цепи при постоянном токе возбуж- -(7У, (23-50)  Е= const Рис. 23-50. Схема серводвигателя с независимым возбуждением. дения. Изменение направления вращения двигателя достигается сменой полярности управляющего напряжения, подводимого к якорю. Схема такого двигателя показана на рис. 23-50. Вращающийся момент М, развиваемый двигателем постоянного тока, пропорционален произведению тока якоря /я и магнитного потока Ф, создаваемого обмоткой возбуждения: М = Км/яФ, (23-49) где Ки- коэффициент пропорциональности, зависящий от конструкции и схемы якоря. Установившаяся скорость холостого хода Пх.х двигателя определяется из соотношения где Uy - управляющее напряжение, подводимое к якорю двигателя; Ке-коэффициент пропорциональности, зависящий от конструкции и схемы якоря. Из последнего выражения следует, что скорость вращения двигателя можно менять за счет изменения напряжения на якорных зажимах. Установившаяся скорость вращения нагруженного двигателя равна: Q=~UV - ~г, (23-51) Ке$> Мн - момент нагрузки; R-сопротивление якорной цепи; К=КыКе-коэффициент пропорциональности. Ненагруженный двигатель постоянного тока с независимым возбуждением, в котором за выходную величину принята угловая скорость (й) вращения вала, по своим динамическим свойствам эквивалентен инерционному звену. Его передаточная функция в операторной форме при этом определяется выражением wQ(D) = -- , (23-52а) -Мэм*-1 Кдв-коэффициент передачи двигателя; Гэм-электромеханическая постоянная двигателя; символ дифференцирования. Если же за выходную величину двигателя принять угол поворота его вала, то передаточная функция сервомотора будет иметь вид: ю (D) = Kffl--L l 1 + T3MD D (23-526) В этом случае в динамическом отношении двигатель эквивалентен последовательному соединению инерционного и интегрирующего звеньев. Динамические свойства сервомотора с независимым возбуждением оцениваются по его электромеханической постоянной времени ТВм. Зависимость величины 7ам от параметров двигателя определяется следующим соотношением: Гэм= , (23-53) где / - момент инерции сервомеханизма. Электромеханические постоянные двигателей малой мощности измеряются сотыми и даже тысячными долями секунды, а для двигателей большой мощности долями и секундами. Если управляющее напряжение на входе двигателя возрастет скачком. то скорость вращения двигателя вследствие его инерционности будет нарастать по экспоненциальному закону с постоянной времени Так: ( -Я Q = Qy\l - е м/. (23-54) При скачкообразном снятии управляющего напряжения (и замкнутой цепи якоря двигателя) торможение будет происходить также по экспоненциальному закону Q=Qye Тэм . (23-55) Из двух последних выражений следует, что чем больше величина 7~Эм, тем дольше затягиваются процессы разгона и торможения, тем, следовательно, больше будут возникающие динамические ошибки в отработке управляющего напряжения. В целях уменьшения электромеханической постоянной времени при конструировании сервомоторов с независимым возбуждением стремятся уменьшить момент инерции якоря, уменьшая его массу и диаметр. Для этого в последнее время в системах автоматического регулирования применяют электродвигатели с независимым возбуждением и печатным якорем, у которого вращаются только медные проводники, вмонтированные печатным способом в диск из прочной пластмассы. Серводвигатели с последовательным возбуждением В системах автоматики широкое применение находят серводвигатели с последовательным возбуждением (рис. 23-51). В них имеются две обмотки возбуждения, соеди- 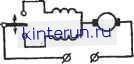 Рис. 23-51. Схема серводвигателя с последовательным возбуждением. ненные последовательно с обмоткой якоря. Обмотки возбуждения намотаны встречно, так что направление создаваемых или магнитных потоков противоположно. В работающем двигателе включена одна обмотка. При переключении обмоток направление тока в якоре не изменяется, а магнитный лоток изменяет свое направление; в результате направление вращения якоря двигателя также изменится. При пуске двигателя ток якоря максимален и равен току возбуждения, поэтому пусковой момент двигателя оказывается большим, что является достоинством подобных сервомоторов. Серводви- гатели с последовательным возбуждением применяются лишь в сочетании с релейными усилителями и не допускают плавного реверсирования. Серводвигатели переменного тока В системах автоматического регулирования широко применяются двухфазные асинхронные серводвигатели небольшой мощности, выполняемые в виде двигателей с короткозамкнутым ротором и двигателей с полым тонкостенным ротором. Такие двигатели называют иногда индукционными. На рис. 23-52 приведена схема индукционного серводвигателя. На статоре серводвигателя имеются две обмотки: обмотка  Рис. 23-52. Схема индукционного электродвигателя. возбуждения wB и управляющая обмотка ш>у. Обе обмотки уложены в пазах статора и сдвинуты относительно друг друга на 90°. Обмотка возбуждения питается от сети переменного тока напряжением возбуждения мв неизменной амплитуды, а управляющая обмотка - управляющим напряжением переменного тока, сдвинутым по фазе на ±90° относительно напряжения возбуждения. При поступлении сигнала в управляющую обмотку возникает вращающееся эллиптическое магнитное поле. Это поле наводит токи в теле цилиндра ротора индукционного двигателя. В результате взаимодействия наведенных токов с вращающимся полем создается вращающий момент. Величина и направление скорости вращения индукционного двигателя зависит от величины и фазы управляющего напряжения. С изменением фазы управляющего напряжения с +90 на -90е (фаза управляющего напряжения при этом должна повернуться на 180°) направление вращения ротора меняется на обратное. Вращающий момент в индукционном двигателе пропорционален произведению напряжений возбуждения и управления и синусу угла <р сдвига фаз между ними: Мвр = K,UBUV sin ф, (23-56) где К\ - коэффициент пропорциональности. Скорость холостого хода индукционного двигателя в зависимости от конструкции двигателя и параметров питающих его напряжений определяется из соотношения 4я£ а Йх.х=-Т~1 . (23-57) р I + а2 где F - частота напряжения питания; р - число пар полюсов в каждой из обмоток двигателя; a.= Uy/UB- коэффициент управления. Установившаяся скорость вращения при наличии момента нагрузки Мв и постоянном управляющем напряжении, т. е. моменте вращения Мвр, составляет: Qh-~~). (23-58) где МПуск - пусковой момент двигателя. Разгои и торможение индукционного двигателя, так же как и двигателя постоянного тока с независимым возбуждением, происходит по экспоненциальному закону с электромеханической постоянной времени Гэм, равной Tsu = J~, (23-59) wnycK где J - момент инерции ротора двигателя. Электромеханическая постоянная времени тем больше, чем больше скорость холостого хода двигателя. Для улучшения динамических свойств индукционных сервомоторов их выполняют многополюсными- с двумя, тремя и четырьмя парами полюсов в каждой обмотке, за счет чего уменьшается скорость холостого хода, а следовательно, и электромеханическая постоянная времени двигателя. Увеличение частоты питающего двигатель напряжения приводит к увеличению скорости холостого хода и электромеханической постоянной времени двигателя. Так, например, если значение Тйм для двигателей на 50 гц составляет 0,05-0,07 сек, то для двигателей на 400 гц - около 0,2-0,3. Динамические свойства индукционных серводвигателей несколько хуже серводвигателей постоянного тока. Особенно это относится к двухполюсным серводвигателям с повышенной частотой питания, у которых велика Qx.x- Отсутствие скользящих контактов, простота и надежность конструкции индукционных серводвигателей определяют их все более широкое использование в системах автоматического регулирования. Серводвигатели с электромагнитными и порошковыми муфтами В исполнительных механизмах используются также электродвигатели с равномерным вращением. Для включения и выключения выходного вала исполнительного механизма и изменения направления его вращения в таких механизмах используются электромагнитные или порошковые муфты. На рис. 23-53 приведена упрощенная схема сервомеханизма с фрикционными. электромагнитными муфтами. В механизме используется нереверсивный двигатель 1, постоянно включенный в течение времени работы системы регулирования. Скорость вращения этого двигателя изменяется в сравнительно небольших пределах в момент включения или измене- 7 3 4 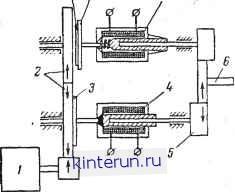 Рис. 23-53. Схема, сервомеханизма с фрнкциоины-ми муфтами. ния величины нагрузки. Шестерни 2 с внешним зацеплением постоянно вращаются вместе с валом двигателя. Диски 3 располагаются вблизи шестерен 2 и могут приближаться к ним посредством электромагнитов 4. На боковой поверхности шестерен или дисков уложены фрикционные кольца 7 из пластмассы или чугуна. Сигнал управления подводится к об-мотКе одного из электромагнитов. При срабатывании одного из электромагнитов (например, нижнего рис. 23-53) соответствующий фрикционный диск оказывается прижатым к вращающейся шестерне и за счет возникающего момента трения начинает вращаться вместе с шестерней.- Вместе с диском в определенном направлении будут вращаться ось 5 и выходной вал 6. Если нижний электромагнит выключить и подвести сигнал управления к катушке верхнего электромагнита, то он сработает и выходной вал сервомеханизма будет вращаться в противоположном направлении. В сервомеханизмах с электромагнитными муфтами угловое движение выходного вала существенно не влияет на процессы в цепях электромагнитов, поэтому такие механизмы часто называют механизмами однонаправленного действия. При включении электромагнита скорость выходного вала за счет проскальзывания фрикционных поверхностей сцепления нарастает с течением времени линейно. Время разгона tpa3 при этом равно- раз- тр (23-60)
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


